Podczas pracy z Arduino, wielu radioamatorów używa silników krok po kroku. Ale co to jest? Jak podłączyć? A jak z nim pracować? I ogólnie, gdzie są one używane? Odpowiedzi na wszystkie te pytania zostaną przedstawione w tym artykule.
O silnikach krokowych
Można powiedzieć, że silniki krokowe są podstawą precyzyjnej robotyki. Są używane wszędzie ze względu na ich dokładność. Faktem jest, że silniki krokowe używają małych stopni podczas obracania wału, co pozwala na ich precyzję podczas pracy. To dzięki "krokom" ich i zaczęto nazywać je silnikami krokowymi. Weźmy na przykład drukarkę. Tam też jest używany silnik krokowy. Albo dowolny manipulator, gdzie dokładność jest bardzo ważna, ponieważ nawet jeśli robot popełni błąd o pół stopnia - wszystko pójdzie nie tak. Analogię silników krokowych można uznać za serwonapędy, ponieważ ich programowanie wskazuje również na stopień rotacji, ale serwo jest gorsze od dokładności silników skokowych. Ale jest wiele sytuacji, w których użycie serwonapędów jest bardziej odpowiednie niż użycie "spacerowiczów".
Silnik krokowy 28BYJ-48
Wśród wielu wybranych silników krokowych jest właśnie silnik krokowy modelu 28BYJ-48. Kosztuje dość tanio, tylko 100-150 rubli za sztukę. Wygląd silnika krokowego dla Ardouins można zobaczyć na poniższym zdjęciu.
Wielu radioamatorów preferuje ten konkretny model ze względu na niskie ceny i dobrą dokładność. Typ silnika - unipolarny, liczba faz - 4. Konsumujesilnik krokowy dla Arduinova od 5 do 12V. Zaleca się jednak stosowanie napięcia 6-7 V. Silniki mogą pracować w dwóch trybach: polnoshahovыy i polushahovыy. Zalecane do stosowania w trybie pół-skoku. Jest 5625 stopni na krok. Po pełnym kroku otrzymuje się 1125 stopni. Masa silnika - 30 gramów.
sterownika ULN2003
, aby połączyć silnik krokowy "Arduyinov" używa specjalnego urządzenia. Jednym z nich jest ULN2003. Wynika to z faktu, że podczas korzystania z silnika krokowego jest na tyle mocny, że kontakty Arduino moc po prostu nie może się ostać. Aby to zrobić, używany jest sterownik. Silnik jest podłączony do sterownika, wymieszać wszystko prawie niemożliwe, ponieważ nie jest kluczem, który pokazuje, w jaki sposób należy go podłączyć. Cóż, a następnie sam sterownik łączy się z Arduino w celu dalszej pracy. Większość sklepów w sterowniku już pochodzi z silnikiem krokowym. Istnieją jednak przypadki, gdy silniki są sprzedawane bez kierowcy, należy zwrócić na to uwagę. Jeśli kupujesz Aliexpress, lepiej jest pracować tylko ze sprawdzonymi dostawcami z wieloma recenzjami.
przyłącza
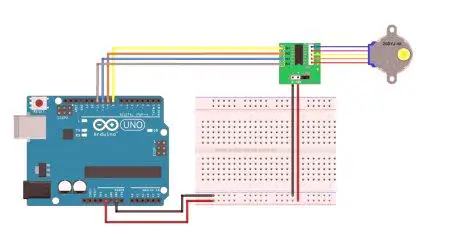
Jak wspomniano powyżej, do silnika krokowego z "Arduyinov" sterownik jest używany. Aby zasilić silnik, musisz użyć innego źródła, aby uniknąć przeciążenia karty Arduino. I inne wnioski, zaczynając od IN1 do IN4, łączymy się z dowolnymi cyfrowymi kontaktami w "Arduinov". Jak widać podłączenie silnika krokowego do Arduin jest całkiem proste. Na zdjęciu widać przykład połączenia.
Biuro
zarządzanie silników stepowych z "Ardouinov" w ramach środowiska programistycznego zawiera już gotową bibliotekę, która pozwala kontrolować silnik za pomocą małego kodu programu. Gdyby tak nie było, musiałby za pomocą specjalnej tabeli skompilować i obliczyć ruch silnika, co zajęłoby dużo czasu. Istnieje jednak także minus tej biblioteki. Faktem jest, że pozwala on na korzystanie z silnika tylko w trybie pełnoetapowym. Chociaż początkowo zaleca się użycie "krokowego" w półetapie. Ale w przypadku prostych projektów wykorzystujących silnik jednoetapowy ta biblioteka jest odpowiednia. Nazywa się Stepper. Możesz napisać kod sterujący silnikiem krokowym z "Arduin". Szkic wygląda jak na poniższym przykładzie.
#include
const int stepsPerRevolution = 200;
Stepper myStepper (stepsPerRevolution, 891011); //połączenie z pinami 811 na Arduinovie
void setup () {
myStepper.setSpeed (60); //ustawienie prędkości wirnika
Serial.begin (9600);
}
void loop () {
//Funkcja czeka na polecenie, aby przekonwertować tekst i wysyła sygnał do silnika, aby obrócić go do określonej liczby kroków.
Serial.println ("Przenieś w prawo"); //zgodnie z ruchem wskazówek zegara
myStepper.step (stepsPerRevolution);
opóźnienie (1000);
Serial.println ("Przesuń w lewo"); //przeciwnie do ruchu wskazówek zegara
myStepper.step (-stepsPerRevolution);
opóźnienie (1000);
}Jest to przykład z samej biblioteki do sterowania silnikami krokowymi. Możesz określić liczbę kroków, które musisz wykonać, iz jaką prędkością. Przyjrzyj się kodowi bardziej szczegółowo. Na samym początku biblioteka Stepper jest już podłączonazostało to powiedziane powyżej. Następnie tworzona jest tablica z liczbą kroków, które musi wykonać silnik krokowy. Następnie tworzona jest zmienna typu krokowego z danymi za pomocą styków podłączonych do silnika krokowego Arduino. Prędkość jest ustawiona i już proces ruchu silnika krokowego. Ale jeśli chcesz używać więcej niż jednego silnika w swoim projekcie i pracować w trybie półetapowym, możesz użyć bibliotek innych firm. Jednym z nich jest Accel Stepper. Ta biblioteka bardzo dobrze zaprezentowała się w pracy, ma wiele możliwości. Gdy praca z jej krokami jest dokładna, silniki się nie nagrzewają. Ogólnie zaleca się go używać. Aby zainstalować bibliotekę należy pobrać i przenieść zawartość folderu archiwach biblioteki w folderze głównym Arduino. Ten artykuł został uznany za przykładem łączenia silnik krokowy do „Arduyinov” i jego kontroli przez kod. Każdy amator radiowy musi przynajmniej raz w swoich projektach spróbować z nim pracować!